Pod的生命周期
本文主要介绍kubelet如何通过
syncloop和podworker管理Pod的生命周期,以及如何通过CRI接口与container runtime交互
概述
Kubernetes中的Pod是最小的调度单元,其生命周期由kubelet负责管理。kubelet通过内部的syncloop和podworker机制,结合CRI(Container Runtime Interface)与底层容器运行时(如containerd、CRI-O等)进行交互,实现对Pod的创建、更新、删除等操作。
syncloop机制
syncloop是kubelet的主循环,负责周期性地同步节点上的Pod状态。其主循环流程如下:
- 检查运行时错误(如容器运行时不可用):有错误则退避等待,无错误则重置退避时间
- 记录循环监控时间戳(用于健康检查)
- 调用
syncLoopIteration处理单次事件podworker- 配置更新事件
configCh- 新增POD: 调用
HandlePodAdditions接纳并启动Pod - 更新POD: 调用
HandlePodUpdates同步更新后的配置 - 移除POD: 调用
HandlePodRemoves清理Pod - 调和POD(状态不一致): 调用
HandlePodReconcile修复状态 - 优雅删除POD: 按
UPDATE处理(保证优雅关闭流程)
- 新增POD: 调用
- PLEG生命周期事件
plegCh- 通过
isSyncPodWorthy(e)判断事件是否需要触发 Pod 同步 - 从
podManager中查询事件对应的Pod,调用HandlePodSyncs同步状态 - 若事件为
ContainerDied,触发容器清理(cleanUpContainersInPod)
- 通过
- 周期性同步事件
syncCh> 由 syncTicker(1 秒周期)触发,兜底机制:- 调用
kl.getPodsToSync()获取待同步的Pod列表 - 调用
HandlePodSyncs批量同步,确保无事件时也能维持状态一致
- 调用
- 健康检查事件
liveness/readiness/startup- liveness: 失败则调用
handleProbeSync标记为不健康,可能触发重启 - readiness: 更新POD就绪状态
SetContainerReadiness - startup: 更新POD启动状态
SetContainerStartup
- liveness: 失败则调用
- 周期性清理事件
housekeepingCh> 周期性触发Pod清理任务(默认周期housekeepingPeriod=2s)- 前置检查: 需所有配置源就绪(
sourcesReady.AllReady()),避免误删未同步的Pod - 核心逻辑: 调用
HandlePodCleanups清理无效Pod(如已删除但残留的容器、过期的镜像) - 监控: 若清理耗时超过
housekeepingWarningDuration,输出告警日志
- 前置检查: 需所有配置源就绪(
- 配置更新事件
- 再次记录监控时间戳,完成一次迭代
podworker机制
在Kubelet的syncLoop核心循环之下,PodWorker机制是负责将 Pod期望状态(如创建、更新、删除)落地为运行状态的关键组件。它本质是一套并行的Pod任务执行框架:每个Pod对应一个独立的Worker 协程,通过“事件队列 + 状态机”确保Pod操作的原子性、幂等性和有序性,避免并发操作冲突。其实现位于pkg/kubelet/pod_workers.go中
核心组件
- Pod Worker Manager(Worker 管理器)
- 维护
podSyncStatuses映射表 - 接
syncLoop分发的事件(如HandlePodAdditions),检查该Pod是否已存在Status- 不存在: 创建
podWorkerLoop协程和channel,绑定到该Pod - 已存在: 缓存channel中写数据
- 不存在: 创建
- Pod 被删除时
- 关闭channel
- 清理映射表
- 维护
- Per Pod事件通道(
podUpdates = make(chan struct{}, 1)) - 维护Pod状态
Kubelet Pod Worker 核心循环(podWorkerLoop)
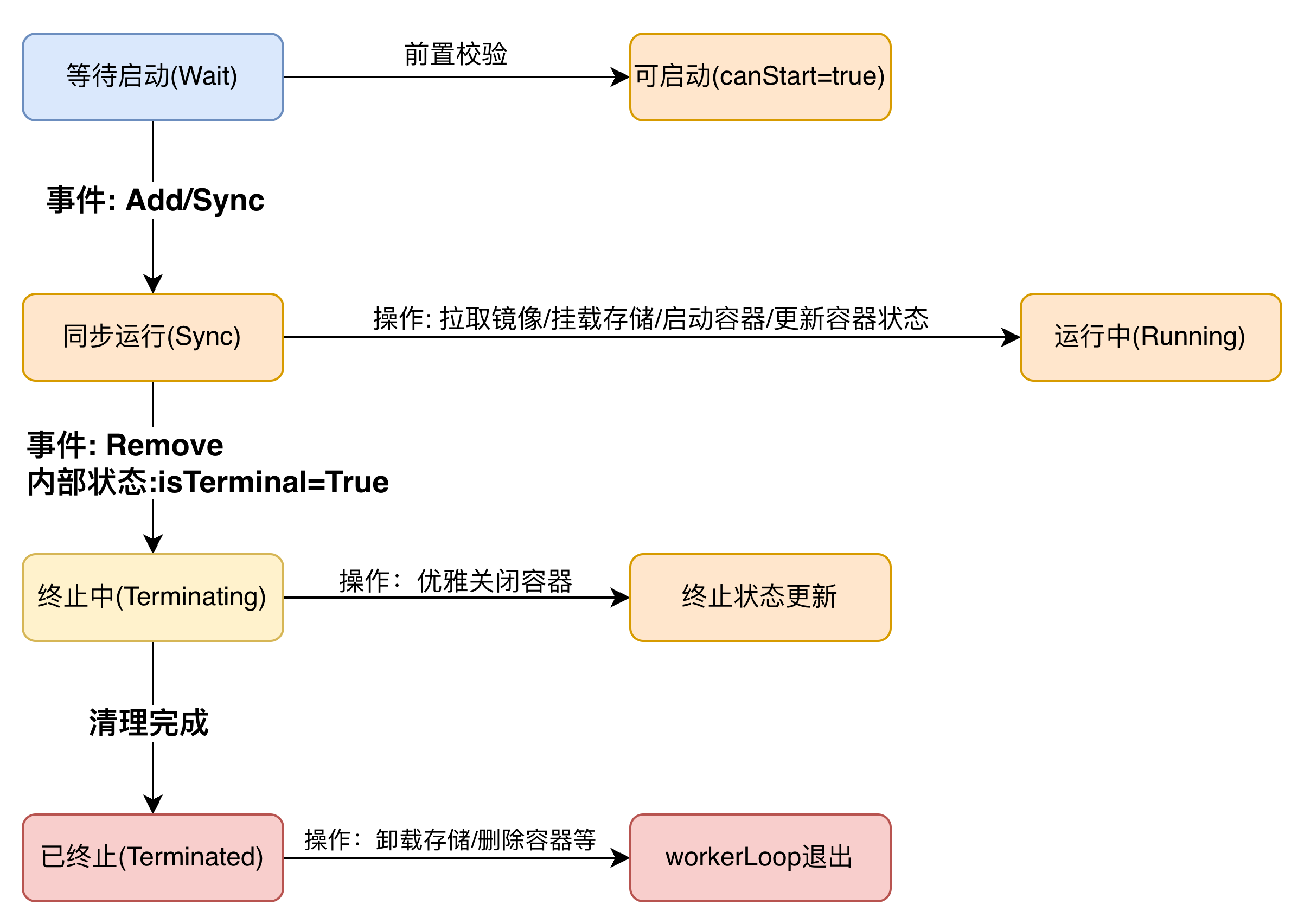
podWorkerLoop是每个Pod专属 Worker 协程的核心执行逻辑,负责驱动Pod完整生命周期的状态流转(从启动到终止),严格遵循 “串行处理、状态机驱动、错误重试” 原则。它是Pod Worker机制的 “执行引擎”,直接对接容器运行时,将syncLoop分发的事件(ADD/UPDATE/REMOVE)落地为具体的 Pod操作。其核心流程如下:
- 启动前检查: 调用
p.startPodSync(podUID)做前置校验,确保操作合法性- 确保同一时刻只有一个Worker处理该Pod(通过podWorkers的锁机制)
- 避免 “重复启动”(如已终止的 Pod 再次收到 ADD 事件)
- 状态缓存刷新: 调用
p.podCache.GetNewerThan(update.Options.Pod.UID, lastSyncTime)获取最新运行状态- 作用: 从
podCache(基于 PLEG 事件更新)获取比上一次同步时间(lastSyncTime)更新的Pod状态(kubecontainer.PodStatus),包含容器列表、容器状态(运行 / 退出)、退出码等 - 异常处理: 若获取状态失败(如缓存未就绪),记录Warning事件(
FailedSync)并返回错误,触发后续重试 - 特殊场景: 若操作类型是 “终止运行时 Pod”(
RunningPod != nil),无需获取状态,直接执行终止操作(因运行时已明确Pod存在)
- 作用: 从
- 阶段化操作执行: 根据workType操作类型进入不同阶段(状态机)
- 同步运行阶段
- 终止中阶段
- 以终止阶段
- 错误处理和状态流转
- 重试与阶段流转调度
生命周期事件
POD阶段
Pod的生命周期主要包括以下几个阶段:
- Pending: Pod 已被 Kubernetes 集群接受,但一个或多个容器尚未设置并准备运行
- Running: Pod 已被绑定到节点,并且所有容器都已创建。至少一个容器仍在运行,或者正在启动或重启过程中
- Succeeded: Pod 中的所有容器都已成功终止,并且不会被重启
- Failed: Pod 中的所有容器都已终止,并且至少有一个容器终止失败
- Unknown:由于某种原因无法获取 Pod 的状态。此阶段通常是由于与 Pod 应该运行的节点通信时出错而发生的。
容器状态
除了 Pod 的整体阶段之外,Kubernetes 还跟踪 Pod 中每个容器的状态。你可以使用容器生命周期钩子来触发事件,使其在容器生命周期中的特定点运行。
一旦调度器将Pod分配给一个节点,kubelet就会使用容器运行时为该Pod创建容器。容器有三种可能的状态:Waiting、Running和Terminated。
Waiting: 如果容器既不在Running状态也不在Terminated状态,则它处于Waiting状态Running:Running状态表示容器正在执行而没有问题Terminated: 处于Terminated状态的容器已经开始执行,然后要么运行完成,要么因某种原因失败