ericpuwang
字符串、数组和广义表
字符串
字符串一般简称串。串是一种特殊的线性表,其特殊性体现在数据元素是一个字符,也就是说,串是一种内容受限的线性表。
串由 零个或多个字符 组成的有限序列。 由一个或多个空格组成的串称为 空格串
模式匹配算法
自串的定位运算通常称为串的 模式匹配 或者 串匹配 。
BF 算法
BF 算法思路直观简明。但当匹配失败时,主串的指针 j 总是回溯到
i-j+2位置,模式串的指针总是恢复到首字符位置 j=1,因此算法时间复杂度高, 是O(n*m)
- 分别利用计数指针
i和j指示主串S和模式串T中当前正在比较的字符 位置,i初值为 1,j初值为 1 - 如果两个串均未比较到串尾,即
i和j均分别小于等于 S 和 T 的长度时,则循环执行以下操作:S.ch[i]和T.ch[j]比较,若相等,则i和j分别指示串中下个位置,继续比较后续字符- 若不等,指针后退重新开始匹配,从主串的下一个字符(
i=i-j+2)起再重新和模式的第一个字符(j=1)比较
- 如果
j>T.length,说明模式T中的每个字符依次和主串S中的一个连续字符序列相等,则匹配成功。返回和模式 T 中第一个字符相等的字符在主串 S 中的序号(i-T.length);否则成匹配不成功,返回 0。
typedef struct SString SString;
struct SString
{
char *ch;
int length;
};
int BF(SString S, SString T, int pos)
{
int i = pos;
int j = 1;
while (i <= S.length && j <= T.length)
{
if (S.ch[i] == T.ch[j])
{
++i;
++j;
}
else
{
i = i - j + 2;
j = 1;
}
}
if (j > T.length)
{
return i - T.length;
}
return 0;
}
KMP 算法
该算法是 BF 算法的改进版,可以在O(n+m)的时间数量级上完成串的模式匹配。其改进在于:每当一趟匹配过程中出现字符比较不等时,不需回溯 i 指针,而是利用已经得到的”部分匹配”的结果将模式向右“滑动”尽可能远的一段距离后,继续进行比较。
typedef struct SString SString;
struct SString
{
char *ch;
int length;
};
int KMP(SString s, SString t)
{
int i = 1;
int j = 1;
int next[255];
build_next(t, next);
while ( i <= s.length && j <= t.length)
{
if (j == 0 || s.ch[i] == t.ch[j])
{
++i;
++j;
}
else
{
j = next[j];
}
}
printf("i: %d, j: %d\n", i, j);
if (j > t.length)
{
return i-t.length;
}
return 0;
}
计算 next 数组
下标从 1 开始 next[1] = 0 (A)
设 next[j]=k,这表明在模式串中存在下列关系:
\[t_1t_2t_3...t_{k-1} = t_{j-k+1}t_{j-k+2}...t_{j-1}\]其中 k 为满足1<k<j的某个值,并且不可能存在k'>k满足等式 A。此时next[j+1]=?可能有以下两种情况:
- 若 $t_j=t_k$ , 则表明在模式串中
并且不可能存在k'>k满足等式 A,这就是说next[j+1]=k+1,即next[j+1]=next[j]+1
- 若 $t_j \neq t_k$ , 则表明在模式串中
此时可把求 next 函数值的问题看成是一个模式匹配的问题,整个模式串即是主串也是模式串,而当前在匹配过程中,已有 $t_{j-k+1}=t_1$ , $t_{j-k+2}=t_2$ , …, $t_{j-1}=t_{k-1}$ ,则当 $t_j \neq t_k$ 时应将模式向右滑动至以模式中的第 next[k]个字符和主串中第 j 个字符相比较。若 next[k]=k’,且 $t_j=t_{k’}$ ,则说明在主串中第j+1个字符之前存在一个长度为k'(即next[k])的最长自串,和模式串中从首字符其长度为 k’的子串相等,即
当(1<k'<k<j)时:
这就是说 next[j+1]=k’+1, 即
next[j+1] = next[k]+1
同理,若 $t_j \neq t_{k’}$ ,则将模式继续向右滑动直至模式中第 next[k]个字符和 tj 对齐 …, 以此类推,直至 tj 和模式中某个字符匹配成功或者不存在任何k'(1<k'<j)满足等式 A,则next[j+1]=1
// next函数值取决于模式串本身,和相匹配的主串无关.
void build_next(SString t, int *next)
{
next[1] = 0;
int i = 1;
int j = 0;
while (i < t.length)
{
if (j == 0 || t.ch[i] == t.ch[j])
{
++i;
++j;
next[i] = j;
} else {
j = next[j];
}
}
}
计算 next【优化版】
前面定义的 next 函数尚有缺陷。例如模式串”aaaab”和主串“aaabaaaab”匹配时,当 $i=4, j=4$ 时 $s.ch[4] \neq t.ch[4]$ , 由 next[j]的指示还需要进行i=4、j=3, i=4、j=2, i=4、j=1这 3 次比较。实际上模式中 1 ~ 3 个字符和第 4 个字符都相等,因此不需要再和主串中第 4 个字符比较,而可以将模式连续向右滑动 4 个字符的位置直接进行i=5、j=1的字符比较。这就是说,若表述定义得到的next[j]=k, 而模式中
void build_nextval(SString t, int *next)
{
next[1] = 0;
int i = 1;
int j = 0;
while (i <= t.length)
{
if (j == 0 || t.ch[i] == t.ch[j])
{
++i;
++j;
if (t.ch[i] != t.ch[j])
{
next[i] = j;
} else {
next[i] = next[j];
}
} else {
j = next[j];
}
}
}
数组
数组是由类型相同的数组元素构成的有序集合,每个元素称为数组元素。 数组一旦被定义,它的维数和维界就不再改变,数组一般只有存取元素和修改元素值的操作。
矩阵形式表示
\[A_{m \times n} = \begin{Bmatrix} a_{00} & a_{01} & a_{02} & \cdots & a_{0,n-1} \\ a_{10} & a_{11} & a_{12} & \cdots & a_{1,n-1} \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ a_{m-1,0} & a_{m-1,1} & a_{m-1,2} & \cdots & a_{m-1,n-1} \\ \end{Bmatrix}\]列向量的一维数组
\[A_{m \times n } = \begin{Bmatrix} \begin{Bmatrix} a_{00} \\ a_{10} \\ \vdots \\ a_{m-1,0} \end{Bmatrix} \begin{Bmatrix} a_{01} \\ a_{11} \\ \vdots \\ a_{m-1,1} \end{Bmatrix} \begin{Bmatrix} a_{02} \\ a_{12} \\ \vdots \\ a_{m-1,2} \end{Bmatrix} \cdots \begin{Bmatrix} a_{0,n-1} \\ a_{1,n-1} \\ \vdots \\ a_{m-1,n-1} \end{Bmatrix} \end{Bmatrix}\]行向量的一维数组
\[A_{m \times n} = ((a_{00}a_{01}\cdots a_{0,n-1}),(a_{10}a_{11}\cdots a_{1,n-1}),\cdots(a_{m-1,0}a_{m-1,1}\cdots a_{m-1,n-1}))\]数组的存储顺序
由于数组一般不做插入或删除操作,故结构中的数据元素个数和元素之间的关系不再发生变动,因此采用顺序存储结构表示比较合适
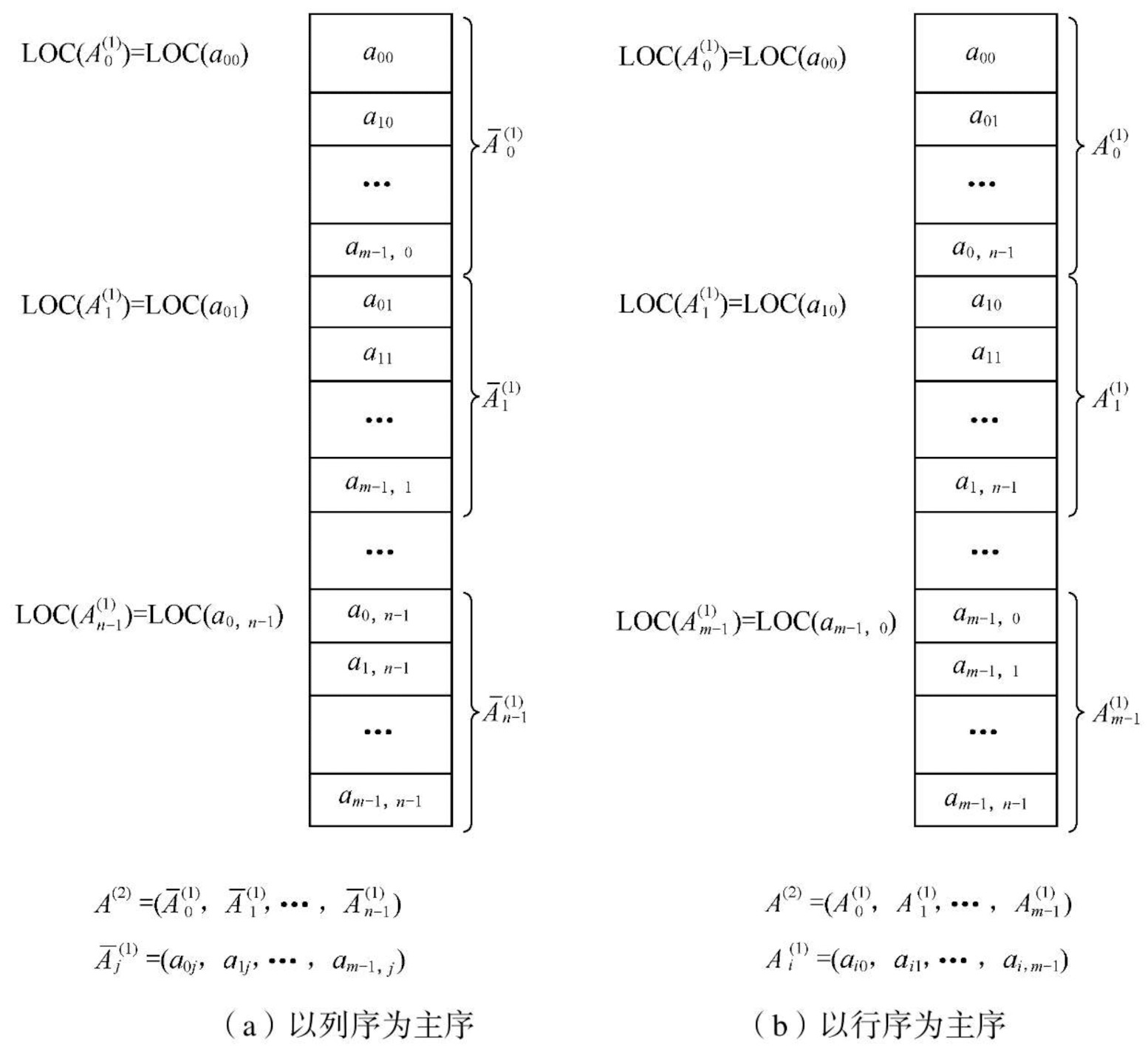 假设每个数据元素占 L 个存储单元,则二维数组 $A_{m \times n}$ 按行序存储时,任一元素 $a_{ij}$ 的存储位置可由下列公式确定
假设每个数据元素占 L 个存储单元,则二维数组 $A_{m \times n}$ 按行序存储时,任一元素 $a_{ij}$ 的存储位置可由下列公式确定
特殊矩阵
对称矩阵
若 n 阶矩阵 A 中元素满足下述性质,则称为 n 阶对称矩阵( $1 \le i,j \le n$ )
\[a_{ij} = a_{ji}\]对于对称矩阵,可以为每一对称元素分配应该存储空间,则可将 $n^2$ 个元素压缩存储到n(n+1)/2个元素的空间中。假设一维数组A'[n(n+1)/2]作为 n 阶矩阵 A 的存储结构,则 A’[k]和矩阵元素 $a_{ij}$ 之间存在着一一对应的关系
三角矩阵
以对角线划分,三角矩阵有上三角矩阵和下三角矩阵两种。上三角矩阵是指矩阵下三角(不包括对角线)中的元素均为常数c或零的 n 阶矩阵,下三角与之相反。对三角矩阵进行压缩存储时,除了和对称矩阵一样,只存储其上(下)三角中的元素之外,再加一个常数c的存储空间即可
上三角矩阵
\[k = \begin{cases} \cfrac{(i-1)(2n-i+2)}{2} + (j-i) \quad [if \quad i \le j] \\ \cfrac{n(n+1)}{2} \quad [if \quad i \gt j] \end{cases}\]下三角矩阵
\[k = \begin{cases} \cfrac{i(i-1)}{2} + j - 1 \quad [if \quad i \ge j] \\ \cfrac{n(n+1)}{2} \quad [if \quad i \lt j] \end{cases}\]广义表
广义表是线性表的推广,也称为列表。广义表的定义是一个递归的定义,它的元素可以是子表,而子表的元素还可以是子表
由于广义表中的数据元素可以有不同的结构(或是原子,或是列表),因此难以用顺序存储结构表示,通常采用链式存储结构。
一对确定的表头和表尾可唯一确定广义表
运算
- 取表头:取出的表头为非空广义表的第一个元素,可以是原子,也可以是子表
- 取表尾:取出的表尾为除去表头外,由其余元素构成的子表。即表尾一定是广义表
头尾链表的存储结构
由于广义表的数据元素可能是原子或者广义表,由此需要两种结构的结点:
- 表结点: 表示广义表
- 原子结点: 表示原子
一个表结点由三个域组成:标识域、指示表头的指针域和指示表尾的指针域,而原子结点只需两个域:标识域和值域。如下所示,tag 是标识域,值为1表明结点是子表,值为0表明结点是原子
表结点
| tag=1 | hp | tp |
|---|
原子结点
| tag=1 | atom |
|---|
定义如下:
// 广义表的头尾链表存储表示
// ATOM = 0 原子
// LIST = 1 子表
typedef enum{ATOM, LIST} ElemTag;
typedef struct GLNode
{
ElemTag tag;
union
{
AtomType atom; // atom时原子结点的值域,AtomType由用户定义
struct
{
struct GLNode* hp, *tp;
}ptr; // ptr是表结点的指针域,ptr.hp和ptr.tp分别指向表头和表尾
};
}*GList;
- 除空表的表头指针为空外,对任何非空广义表,其表头指针均指向一个表结点,且结点中的 hp 域指示广义表表头(或为原子结点,或为表结点),tp 域指向广义表表尾(除非表尾为空,则指针为空,否则必为表结点)
- 容易分清列表中原子和子表所在层次
- 最高层的表结点个数即为广义表的长度
扩展线性链表的存储结构
表结点
| tag1 | hp | tp |
|---|
原子结点
| tag=1 | atom | tp |
|---|