图
子图: 假设有两个图G=(V,E),G'=(V',E'), 若V'是V的子集且E'是E的子集,则称G'是G的子集
无向完全图和有向完全图: 对于无向图,若具有n(n-1)/2条边,则称为无向完全图。对于有向图,若具有n(n-1)条弧,则称为有向完全图
稀疏图和稠密图: 有很少条边或弧(如 $e<nlog_2n$ )的图称为稀疏图,反之称为稠密图
权和网:在实际应用中,每条边可以标上具有某种含义的数值,该数值称为该边上的权。这些权可以表示从一个顶点到另一个顶点的距离,这种带权的图通常称为网
邻接点: 对于无向图G,如果图的边 $(v,v') \in E$ ,则称顶点v和v'互为邻接点,即v和v'相邻接。边(v,v')依附于顶点v和v', 或者说边(v,v')与顶点v和v'相关联
度、入度和出度: 顶点v的度是指和v相关联的边的数目。对于有向图,顶点v的度分为入度和出度。入度是以顶点v为头的弧的数目, 出度是以顶点v为尾的弧的数目
路径和路径长度: 在无向图中,从顶点v到顶点v'的路径是一个顶点序列( $v=v_{i,0},v_{i,1},\cdots,v_{i,m}=v'$ ),其中( $v_{i,j-1},v_{i,j} \in E, 1 \leq j \leq m$ )。在有向图中,路径也是有向的,顶点序列应满足 $
回路或环: 第一个顶点和最后一个顶底相同的路径称为回路或环
简单路径、简单回路或简单环: 序列中顶点不重复出现的路径称为简单路径。除了第一个顶点和最后一个顶点之外,其余顶点不重复出现的回路,称为简单回路或简单环
连通、连通图和连通分量: 在无向图G中,如果从顶点v到顶点v'有路径,则称v和v'是连通的。如果对于图中任意两个顶点 $v_i, v_j \in V, v_i$ 和 $v_j$ 都是连通的,则称G为连通图。所谓连通分量,指的是无向图中极大连通子图
强连通图和强连通分量: 在有向图G中,如果对于每一对 $v_i,v_j \in V, v_i \ne v_j$ , 从 $v_i$ 到 $v_j$ 和从 $v_j$ 到 $v_i$ 都存在路径,则称G是强连通图。有向图中的极大连通子图称为有向图的强连通分量
连通图的生成树: 一个极小连通子图,它含有图中全部顶点,但只有足以构成一棵树的n-1条边,这样的连通子图称为连通图的生成树
有向树和生成森林: 有一个顶点的入度为0,其余顶点的入度均为1的有向图称为有向树,一个有向图的生成森林是有若干棵有向树组成
图的存储结构
邻接矩阵
优点
- 便于判断两个顶点之间是否有边,即根据A[i][j]=0或1来判断
- 便于计算各顶点的度。对于无向图,邻接矩阵第
i行元素之和即为顶底i的度;对于有向图,第i行元素的和就是顶点i的出度,第i列元素的和为顶点i的入度
缺点
- 不便于增加和删除顶点
- 不便于统计边的数目,需要扫描邻接矩阵所有元素才能统计完毕。时间复杂度为 $O(n^2)$
- 空间复杂度高,复杂度为 $O(n^2)$
用二维数组来表示元素之间的关系
邻接矩阵是表示顶点之间相邻关系的矩阵。设G(V,E)是具有n个顶点的图,则G的邻接矩阵是具有如下性质的n阶方阵
$$
A[i][j] = \begin{cases}
1 \qquad
示例:
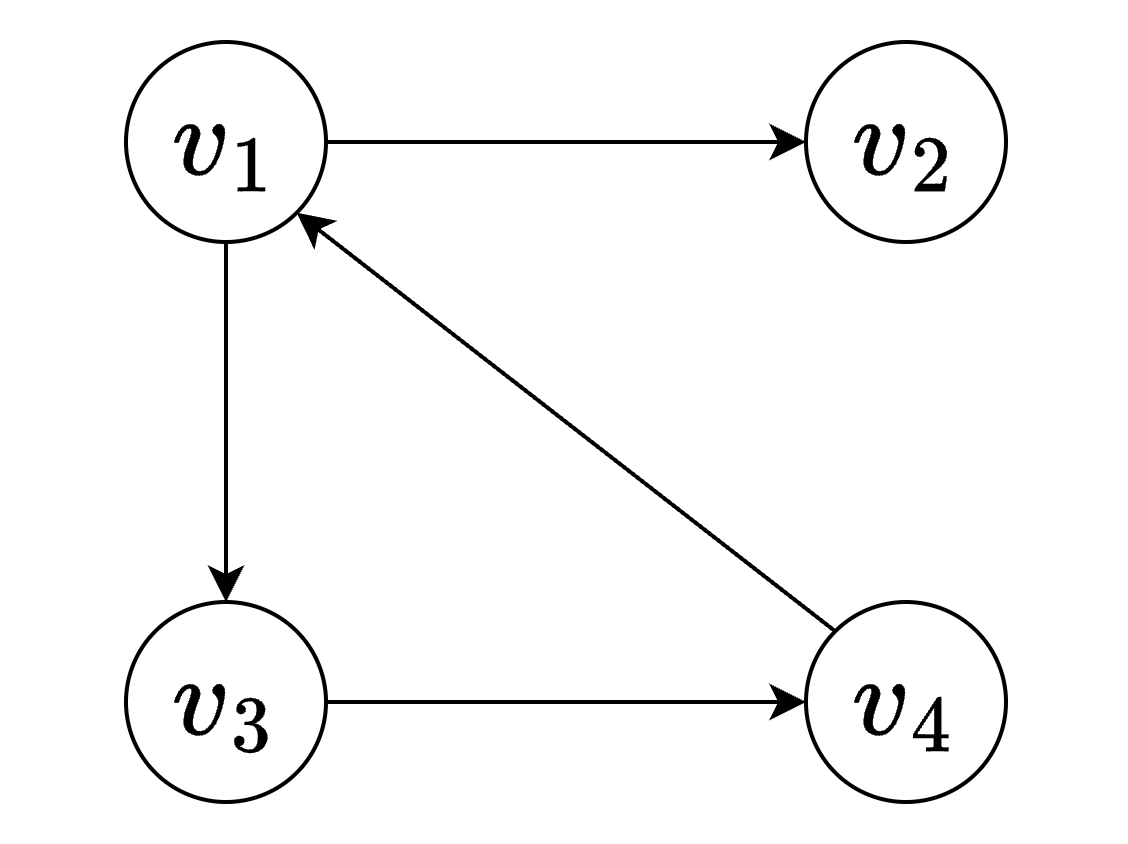
$$ G_{1,arcs} = \begin{bmatrix} 0 & 1 & 1 & 0 \ 0 & 0 & 0 & 0 \ 0 & 0 & 0 & 1 \ 1 & 0 & 0 & 0 \end{bmatrix} $$
 若G是网 ,则邻接矩阵可以定义为
若G是网 ,则邻接矩阵可以定义为
$$
A[i][j] = \begin{cases}
w_{i,j} \qquad \text{若}
示例:
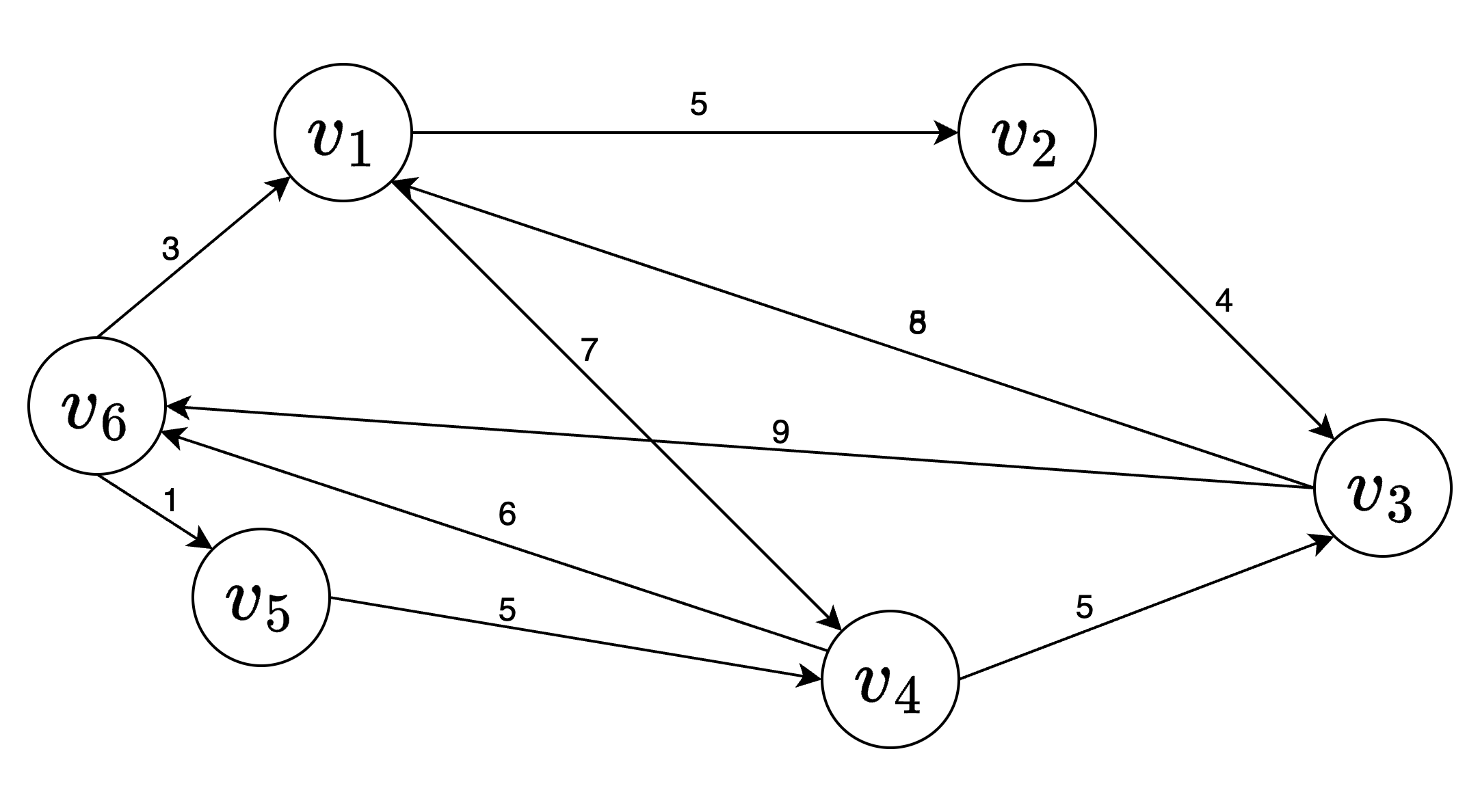
$$ \begin{bmatrix} \infty & 5 & \infty & 7 & \infty & \infty \ \infty & \infty & 4 & \infty & \infty & \infty \ 8 & \infty & \infty & \infty & \infty & 9 \ \infty & \infty & 5 & \infty & \infty & 6 \ \infty & \infty & \infty & 5 & \infty & \infty \ 3 & \infty & \infty & \infty & 1 & \infty \ \end{bmatrix} $$
 创建无向网 时间复杂度 $O(n^2)$
创建无向网 时间复杂度 $O(n^2)$
// 图的邻接矩阵存储表示
#define MaxInt 32767 // 表示极大值∞
#define MVNum 100 // 最大顶点数
typedef char VerTexType; // 假设顶点的数据类型是字符型
typedef int ArcType; // 假设边的权值类型为整型
typedef struct
{
VerTexType vexs[MVNum]; // 顶点表
ArcType arcs[MVNum][MVNum]; // 邻接矩阵
int vexnum, arcnum; // 图的当前顶点数和边数
}AMGraph;
// 确定顶点v的在图中的位置
int LocateVex(AMGraph *g, VerTexType v)
{
for (int i = 0; i < g->vexnum; i++)
{
if (g->vexs[i] == v)
{
return i;
}
}
return -1;
}
// 采用邻接矩阵表示法创建无向网
// 1. 输入总顶点数和总边数
// 2. 依次输入点的信息存储顶点表
// 3. 初始化邻接矩阵,使每个权值初始化为极大值
// 4. 构造邻接矩阵,依次输入每条边依附的顶点和其权值,确定两个顶点在图中的位置之后,使相应边
// 赋予相应的权值,同时使其对称边赋予相同的权值
int CreateUDN(AMGraph *g)
{
// 输入总顶点数,总边数
scanf("%d%d", &g->vexnum, &g->arcnum);
// 依次输入点的信息
for (int i = 0; i < g->vexnum; ++i)
{
scanf("%c", &g->vexs[i]);
}
// 初始化邻接矩阵
for (int i = 0; i < g->vexnum; i++)
{
for (int j = 0; j < g->vexnum; j++)
{
g->arcs[i][j] = MaxInt;
}
}
// 构造邻接矩阵
VerTexType v1, v2;
ArcType w;
for (int k = 0; k < g->arcnum; k++)
{
scanf("%c%c%d", &v1,&v2,&w);
int i = LocateVex(g, v1);
int j = LocateVex(g, v2);
if (i == -1 || j == -1) {
return -1;
}
g->arcs[i][j] = w;
}
return 0;
}
创建无向图
针对上述代码,做如下改动即可:
- 初始化邻接矩阵时,将边的权值初始化为0
- 构造邻接矩阵时,将权值
w改为常量1即可
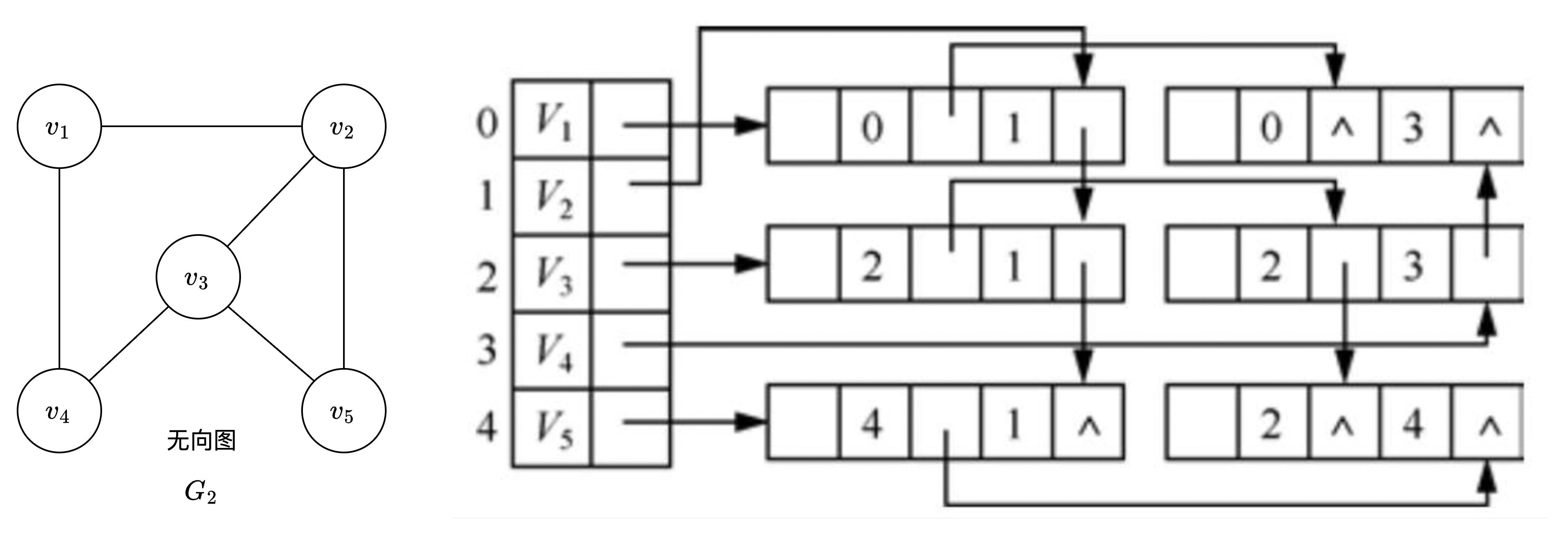
邻接表
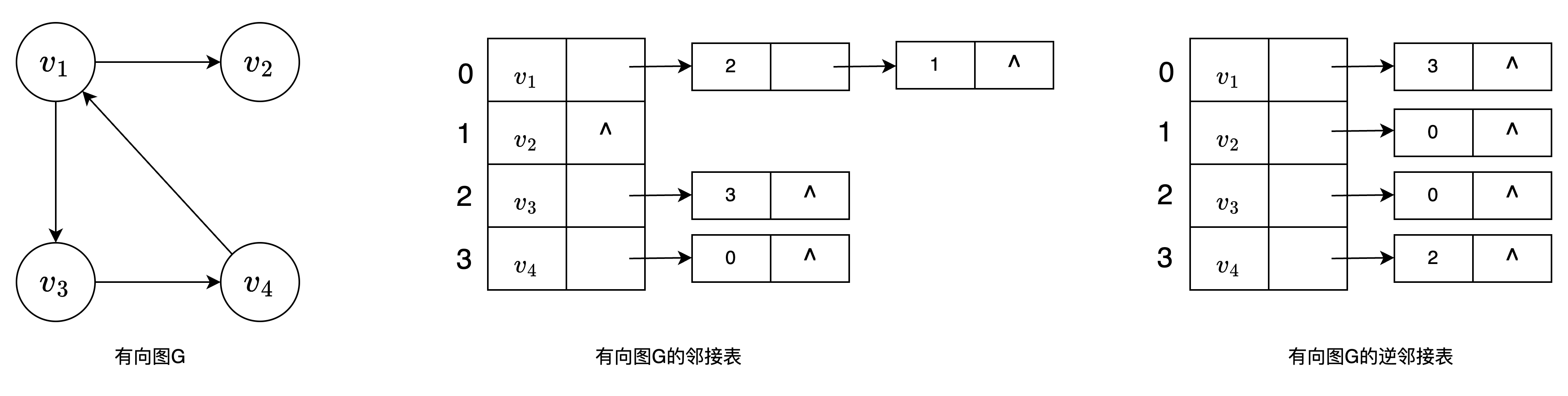
邻接表是图的一种链式存储结构。在邻接表中,对图中每个顶点 $v_i$ 建立一个单链表,把与 $v_i$ 相邻接的顶点放在这个链表中。邻接表中每个单链表的第一个结点存放有关顶点的信息,把这一结点看成链表的表头,其余结点存放有关边的信息,这样邻接表便由两部分组成:表头结点表和边表
- 表头结点表: 由所有表头结点以顺序结构的形式存储,以便可以随机访问任一顶点的边链表。表头结点包括数据域和链域(数据域用于存储顶点 $v_i$ 的名称和其他有关信息;链域用于指向链表中第一个结点即与顶点 $v_i$ 邻接的第一个邻接点)
- 边表:由表示图中顶点间关系的2n个边链表组成。边链表中边结点包括邻接点域(adjvex)、数据域(info)和邻域(nextarc)三部分
- 邻接点域指示与顶点 $v_i$ 相邻的点在图中的位置
- 数据域存储和边相关的信息,如权值等
- 链域指示与顶点 $v_i$ 邻接的下一条边的结点
 * 无向图的邻接表中,顶点 $v_i$ 的度恰为第
* 无向图的邻接表中,顶点 $v_i$ 的度恰为第i个链表中的结点数
* 在有向图中,第i个链表的结点数只是顶点 $v_i$ 的出度;为求入度,必须遍历整个邻接表
* 在所有链表中,其邻接点域的值为i的结点个数是顶点i的入度
逆邻接表 对每个顶点 $v_i$ 建立一个链接所有进入 $v_i$ 的边的表
#include<stdio.h>
#include<stdlib.h>
#define MVNum 100 // 最大顶点数
typedef char VerTexType; // 假设顶点的数据类型是字符型
typedef int ArcType; // 假设边的权值类型为整型
typedef struct OtherInfo {
}OtherInfo;
typedef struct ArcNode {
int adjvex; // 该边所指向的顶点的位置
struct ArcNode *nextarc; // 指向下一条边的指针
OtherInfo into; // 和边相关的信息;
}ArcNode;
typedef struct VNode {
VerTexType data;
ArcNode *firstarc; // 指向第一条依附该顶点的边的指针
}VNode, AdjList[MVNum];
typedef struct ALGraph {
AdjList vertices;
int vexnum, arcnum; // 图的当前顶点数和边数
}ALGraph;
// 确定顶点v的在图中的位置
int LocateVex(ALGraph *g, VerTexType v)
{
for (int i = 0; i < g->vexnum; i++)
{
if (g->vertices[i].data == v)
{
return i;
}
}
return -1;
}
// 采用邻接表表示法创建无向图
// 1. 输入总顶点数和总边数
// 2. 依次输入点的信息存储顶点表,使每个表头结点的指针域初始化为NULL
// 3. 创建邻接表,依次输入每条边依附的两个顶点,确定这两个顶点的序号i和j后,将此边结点分别插入相应边链表的头部
int CreateUDG(ALGraph *g)
{
scanf("%d%d", &g->vexnum, &g->arcnum);
for (int i = 0; i < g->vexnum; i++)
{
scanf("%c", &g->vertices[i].data);
g->vertices[i].firstarc = NULL;
}
for (int k = 0; k < g->arcnum; k++)
{
VerTexType v1, v2;
scanf("%c%c", &v1, &v2);
// 确定v1,v2在g中的位置,即顶点在g->vertices中的序号
int i = LocateVex(g, v1);
int j = LocateVex(g, v2);
if (i == -1 || j == -1) {
return -1;
}
// 将新结点p1插入到vi的边表头部
ArcNode *p1 = (ArcNode*)malloc(sizeof(ArcNode));
p1->adjvex = j;
p1->nextarc = g->vertices[i].firstarc;
g->vertices[i].firstarc = p1;
// 将新结点p2插入到vj的边表头部
ArcNode *p2 = (ArcNode*)malloc(sizeof(ArcNode));
p2->adjvex = i;
p2->nextarc = g->vertices[j].firstarc;
g->vertices[j].firstarc = p2;
}
return 0;
}
建立有向图的邻接表与此类似,只是更加简单,每读入一个顶点对序号\
优缺点
优点
- 便于增加和删除顶点
- 便于统计边的数目,按照顶点表顺序扫描所有边表可得到边的数目,其时间复杂度为
O(n+e) - 空间效率高。对于一个具有
n个顶点e条边的图G,若G是无向图,则其在邻接表表示中有n个顶点和2e个边表结点;若G是有向图,则在它的邻接表或逆邻接表表示中有n个顶点和e个边表结点,因此邻接表或逆邻接表表示的空间复杂度为O(n+e),适合表示稀疏图
缺点
- 不便于判断顶点之间是否有边,要判定 $v_i$ 和 $v_j$ 之间是否有边,就需要扫描第
i个边表,时间复杂度O(n) - 不便于计算有向图各个顶点的度。对于无向图,在邻接表表示中顶点 $v_i$ 的度是第
i个边表中的结点个数。在有向图的邻接表中,第i个边表上的结点个数是顶点 $v_i$ 的出度,但求 $v_i$ 的入度比较困难,需要遍历各顶点的边表;若有向图采用逆邻接表表示,则与之相反,第i个边表上的结点个数是顶点 $v_i$ 的入度
| 比较项目 存储结构 | 邻接矩阵 | 邻接表 | |||
|---|---|---|---|---|---|
| 无向图 | 有向图 | 无向图 | 有向图 | ||
| 空间 | 邻接矩阵对称,可压缩至n(n-1)/2个单元 |
邻接矩阵不对称,存储n2个单元 |
存储n+2e个单元 |
存储n+e个单元 |
|
| 时间 | 求某个顶点vi的度 | 扫描邻接矩阵中序号i对应的一行。O(1) |
|
扫描vi的边表。最坏情况O(n) |
|
| 求边的数目 | 扫描邻接矩阵。O(n2) |
按顶点表顺序扫描所有边表。O(n+2e) |
按顶点表顺序扫描所有边表。O(n+e) |
||
| 判定边(vi, vj)是否存在 | 直接检查邻接矩阵A[i][j]元素的值。O(1) |
扫描vi的边表。最坏情况O(n) |
|||
| 使用情况 | 稠密图 | 稀疏图 | |||
十字链表
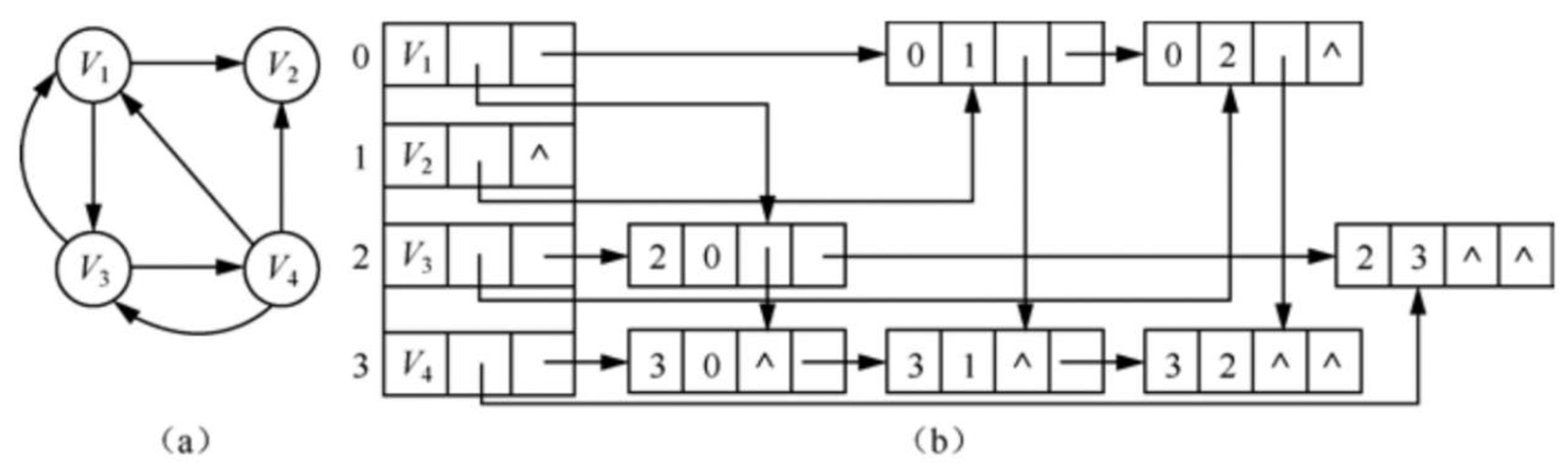
十字链表是 有向图 的另一个链式存储结构。可以看成是将有向图的邻接表和逆邻接表结合起来得到的一种链表。在十字链表中,对应于有向图中每一条弧有一个结点,对应于每个顶点也有一个结点,结点的结构如下图所示:

弧结点中
- 尾域(tailvex): 表示弧尾在图中的结点
- 头域(headvex): 表示弧头在图中的结点
- 链域(hlink): 表示指向弧头相同的下一条弧
- 链域(tlink): 表示指向弧尾相同的下一条弧
- info域: 指向该弧的相关信息 弧头相同的弧在同一链表上;弧尾相同的弧也在同一链表上。它们的头结点即为顶点结点。
顶点结点中
data域存储和顶点相关的信息,如顶点的名称等firstin指向以该顶点为弧头的第一个弧结点firstout指向以该顶点为弧尾的第一个弧结点
 若将有向图的邻接矩阵看成稀疏矩阵的话,则十字链表也可以看成是邻接矩阵的链式存储结构,在图的十字链表中,弧结点所在的链表非循环链表,结点之间相对位置自然形成,不一定按照顶点序号有序,表头结点即顶点结点,它们之间不是链接,而是顺序存储。
若将有向图的邻接矩阵看成稀疏矩阵的话,则十字链表也可以看成是邻接矩阵的链式存储结构,在图的十字链表中,弧结点所在的链表非循环链表,结点之间相对位置自然形成,不一定按照顶点序号有序,表头结点即顶点结点,它们之间不是链接,而是顺序存储。
#include<stdio.h>
#include<stdlib.h>
#define MAX_VERTEX_NUM 20
typedef char VertexType;
typedef struct InfoType {
}InfoType;
typedef struct ArcBox {
int tailvex, headvex; // 该狐的尾和头顶点的位置
struct ArcBox *hlink, *tlink; // 分别为狐头相同和狐尾相同的狐的链域
InfoType *info; // 该狐相关信息的指针
}ArcBox;
typedef struct VexNode {
VertexType data;
ArcBox *firstin, *firstout; // 分别指向第一条入狐和出狐
}VexNode;
typedef struct OLGraph {
VexNode xlist[MAX_VERTEX_NUM]; // 表头向量
int vexnum, arcnum; // 有向图的当前顶点数和狐数
}OLGraph;
int Locate(OLGraph *g, VertexType x)
{
for (int i = 0; i < g->vexnum; i++)
{
if (g->xlist[i].data == x)
{
return i;
}
}
return -1;
}
int createGraph(OLGraph *g)
{
printf("请输入图的顶点数和狐数\n");
scanf("%d%d", &g->arcnum, &g->vexnum);
printf("请依次输入每个顶点\n");
for (int i = 0; i < g->vexnum; i++)
{
scanf("%c", &g->xlist[i].data);
g->xlist[i].firstin = NULL;
g->xlist[i].firstout = NULL;
}
printf("请依次输入每条狐的起点和终点\n");
for (int k = 0; k < g->arcnum; k++)
{
VertexType x, y;
scanf("%c%c", &x, &y);
int i = Locate(g, x);
int j = Locate(g, y);
if (i == -1 || j == -1) {
return -1;
}
// 创建结点
ArcBox *node = (ArcBox*)malloc(sizeof(ArcBox));
node->headvex = i;
node->tailvex = j;
// 将该结点添加到以i为起始结点的链表上
node->hlink = g->xlist[i].firstin;
g->xlist[i].firstin = node;
// 将该结点添加到以j为尾结点的链表上
node->tlink = g->xlist[i].firstout;
g->xlist[i].firstout = node;
}
return 0;
}
邻接多重表
邻接多重表是 无向图 的另一种链式存储结构。虽然邻接表是无向图的一种很有效的存储结构,在邻接表中容易求得顶点和边得各种信息。但是在邻接表中每一条边 $(v_i,v_j)$ 有两个结点,分别在第i和第j个链表中,这给某些图得操作带来不便,而采用邻接多重表得无向图更为适宜解决这一类问题
在邻接多重表中,每一条边用一个结点表示,由如下所示得6个域组成:
mark标志域:标记该条边是否被搜索过ivex和jvex:该边依附得两个顶点在图中得位置ilink:指向下一条依附于顶点ivex的边jlink:指向下一条依附于顶点jvex的边info:指向和边相关的各种信息的指针域
每一个顶点也用一个结点表示,由如下所示2个域组成:
data:data域存储和顶点相关的信息firstedge:firstedge域指示第一条依附于该顶点的边

#include<stdio.h>
#include<stdlib.h>
#define MAX_VERTEX_NUM 20
typedef enum{unvisited, visited} VisitIf;
typedef char VertexType;
typedef struct InfoType {
}InfoType;
typedef struct EBox {
VisitIf mark; // 访问标记
int ivex, jvex; // 该边依附的两个顶点的位置
struct EBox *ilink, *jlink; // 分别指向依附这两个顶点的下一条边
InfoType *info; // 该狐相关信息的指针
}EBox;
typedef struct VexBox {
VertexType data;
EBox *firstedge; // 指向第一条依附该顶点的边
}VexBox;
typedef struct AMLGraph {
VexBox adjmulist[MAX_VERTEX_NUM];
int vexnum, edgenum; // 无向图的当前顶点数和边数
}AMLGraph;
int Locate(AMLGraph *g, VertexType x)
{
for (int i = 0; i < g->vexnum; i++)
{
if (g->adjmulist[i].data == x)
{
return i;
}
}
return -1;
}
int createUDG(AMLGraph *g)
{
printf("输入顶点数,边数\n");
scanf("%d,%d,%d", &g->vexnum, &g->edgenum);
printf("请输入顶点数\n");
for(int i = 0; i < g->vexnum; i++)
{
scanf("%c", &g->adjmulist[i].data);
g->adjmulist[i].firstedge = NULL;
}
printf("请依次输入每条狐的起点和终点\n");
for (int k = 0; k < g->edgenum; k++)
{
VertexType x, y;
scanf("%c%c", &x, &y);
int i = Locate(g, x);
int j = Locate(g, y);
if (i == -1 || j == -1)
{
return -1;
}
EBox *box = (EBox *)malloc(sizeof(EBox));
box->ivex = i;
box->jvex = j;
box->mark = unvisited;
box->ilink = g->adjmulist[i].firstedge;
box->jlink = g->adjmulist[j].firstedge;
g->adjmulist[j].firstedge = box;
g->adjmulist[i].firstedge = box;
}
return 0;
}
图的遍历
深度优先搜索
类似于树的先序遍历
 对于一个连通图,深度优先搜索遍历的过程如下:
对于一个连通图,深度优先搜索遍历的过程如下:
- 从图中某个顶点v出发,访问v
- 找出刚访问过的顶点的第一个未被访问的邻接点,访问该顶点。以该顶点为新顶点,重复此步骤,直至刚访问过的顶点没有未被访问的邻接点为止
- 返回前一个访问过的且仍有未被访问的邻接点的顶点,找出该顶点的下一个未被访问的邻接点,访问该顶点
- 重复步骤(2)和(3),直至图中所有顶点都被访问过,搜索结束
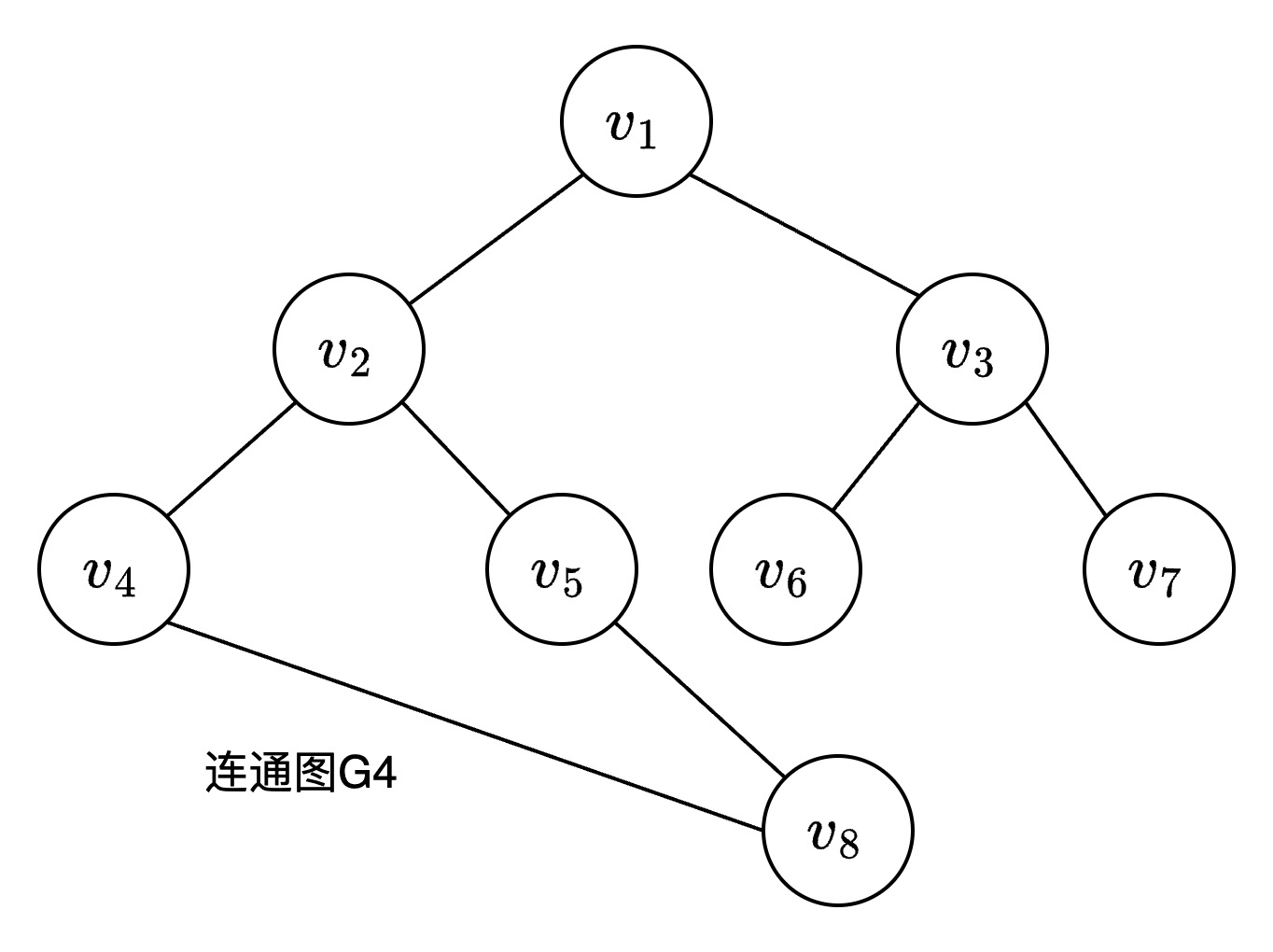
对于连通图G4, 遍历路径 $v_1 -> v_2 -> v_4 -> v_8 -> v_5 -> v_3 -> v_6 -> v_7$
#include<stdio.h>
#include<stdlib.h>
#define MVNum 100 // 最大顶点数
typedef enum{unvisited, visited} VisitIf;
typedef char VerTexType; // 假设顶点的数据类型是字符型
typedef int ArcType; // 假设边的权值类型为整型
typedef struct OtherInfo {
}OtherInfo;
typedef struct ArcNode {
int adjvex; // 该边所指向的顶点的位置
struct ArcNode *nextarc; // 指向下一条边的指针
OtherInfo into; // 和边相关的信息;
}ArcNode;
typedef struct VNode {
VerTexType data;
ArcNode *firstarc; // 指向第一条依附该顶点的边的指针
VisitIf mark; // 访问标记
}VNode, AdjList[MVNum];
typedef struct ALGraph {
AdjList vertices;
int vexnum, arcnum; // 图的当前顶点数和边数
}ALGraph;
// 邻接表图的深度优先搜索
void ALGraphDFS(ALGraph *g, int v)
{
printf("visited %d\n", v);
g->vertices[v].mark = visited;
ArcNode *p = g->vertices[v].firstarc;
while (p != NULL)
{
if (g->vertices[p->adjvex].mark == unvisited)
{
ALGraphDFS(g, p->adjvex);
}
p = p->nextarc;
}
}
void ALGraphDFSTraverse(ALGraph *g)
{
for (int v = 0; v < g->vexnum; v++)
{
if (g->vertices[v].mark == unvisited)
{
ALGraphDFS(g, p->adjvex);
}
}
}
#include <stdio.h>
#include <stdlib.h>
#define MAX_VERTICES 100
typedef enum{unvisited, visited} VisitIf;
typedef struct Node {
int vertex;
struct Node* next;
VisitIf mark;
} Node;
typedef struct Graph {
int numVertices;
Node* adjLists[MAX_VERTICES];
} Graph;
// 创建图
Graph* createGraph(int vertices) {
Graph* graph = malloc(sizeof(Graph));
graph->numVertices = vertices;
for (int i = 0; i < vertices; i++) {
graph->adjLists[i] = NULL;
}
return graph;
}
// 创建节点
Node* createNode(int v) {
Node* newNode = malloc(sizeof(Node));
newNode->vertex = v;
newNode->next = NULL;
return newNode;
}
// 添加边
void addEdge(Graph* graph, int src, int dest) {
Node* newNode = createNode(dest);
newNode->next = graph->adjLists[src];
graph->adjLists[src] = newNode;
newNode = createNode(src);
newNode->next = graph->adjLists[dest];
graph->adjLists[dest] = newNode;
}
// 查找第一个邻接顶点
int FirstAdjVex(Graph* graph, int vertex) {
Node* adjList = graph->adjLists[vertex];
if (adjList != NULL) {
return adjList->vertex; // 返回第一个邻接顶点
}
return -1; // 如果没有邻接顶点,返回-1
}
// 查找下一个邻接顶点
int NextAdjVex(Graph* graph, int vertex, int current) {
Node* adjList = graph->adjLists[vertex];
while (adjList != NULL) {
if (adjList->vertex == current) {
if (adjList->next != NULL) {
return adjList->next->vertex; // 返回下一个邻接顶点
} else {
return -1; // 如果没有下一个邻接顶点,返回-1
}
}
adjList = adjList->next;
}
return -1; // 如果没有找到当前顶点,返回-1
}
// 深度优先搜索
void DFS(Graph* graph, int vertex, int* visited) {
visited[vertex] = 1; // 标记为已访问
printf("Visited %d\n", vertex);
int adjVertex = FirstAdjVex(graph, vertex);
while (adjVertex != -1) {
if (!visited[adjVertex]) {
DFS(graph, adjVertex, visited);
}
adjVertex = NextAdjVex(graph, vertex, adjVertex);
}
}
// 打印图
void printGraph(Graph* graph) {
for (int v = 0; v < graph->numVertices; v++) {
Node* temp = graph->adjLists[v];
printf("Vertex %d: ", v);
while (temp) {
printf("%d -> ", temp->vertex);
temp = temp->next;
}
printf("NULL\n");
}
}
int main() {
Graph* graph = createGraph(5);
addEdge(graph, 0, 1);
addEdge(graph, 0, 4);
addEdge(graph, 1, 2);
addEdge(graph, 1, 3);
addEdge(graph, 1, 4);
addEdge(graph, 2, 3);
addEdge(graph, 3, 4);
printGraph(graph);
int visited[MAX_VERTICES] = {0}; // 访问标记数组
printf("Depth First Search starting from vertex 0:\n");
DFS(graph, 0, visited);
return 0;
}
广度优先搜索
类似于树的按层序遍历
遍历过程如下:
- 从图中某个顶点
v出发,访问v - 依次访问
v的各个未曾访问过的邻接点 - 分别从这些邻接点出发依次访问它们的邻接点,并使“先被访问的顶点的邻接点”先于“后被访问的顶点的邻接点”被访问。重复步骤(3),直至图中所有已被访问的顶点的邻接点都被访问到
对于连通图G4, 遍历路径 $v_1 -> v_2 -> v_3 -> v_4 -> v_5 -> v_6 -> v_7 -> v_7$
#include <stdio.h>
#include <stdlib.h>
#define MAX_VERTICES 100
typedef struct Node {
int vertex;
struct Node* next;
} Node;
typedef struct Graph {
int numVertices;
Node* adjLists[MAX_VERTICES];
} Graph;
// 链队
typedef struct QNode QNode;
typedef struct QNode* QPtr;
struct QNode
{
int data;
struct QNode* next;
};
typedef struct LinkQueue LinkQueue;
struct LinkQueue
{
QPtr front; // 队头指针
QPtr rear; // 队尾指针
};
// InitQueue 链队初始化
// 1、生成新结点,队头和队尾都指向此结点
// 2、头结点的指针域置为空
void InitQueue(LinkQueue *q)
{
QPtr node = (QPtr)malloc(sizeof(QNode));
node->next = NULL;
q->front = node;
q->rear = node;
}
// EnQueue 元素入队
// 1、为入队元素分配结点空间,用指针p指向
// 2、将新结点数据域置为e
// 3、将新结点插入到队尾
// 4、修改队尾指针为p
void EnQueue(LinkQueue *q, int e)
{
QPtr p = (QPtr)malloc(sizeof(QNode));
p->data = e;
p->next = NULL;
q->rear->next = p;
q->rear = p;
}
// DeQueue 元素出队
// 1、判断队列是否为空,若空则返回-1
// 2、临时保存队头元素的空间,以备释放
// 3、修改头结点的指针域,指向下一个结点
// 4、判断出队是否为最后一个元素,若是,则将队尾指针重新赋值,指向头结点
// 5、释放原队头元素的空间
void DeQueue(LinkQueue *q, int *e)
{
if (q->rear == q->front)
{
return;
}
QPtr p = q->front->next;
*e = p->data;
q->front->next = p->next;
if (q->rear == p)
{
q->rear = q->front;
}
free(p);
}
// 创建图
Graph* createGraph(int vertices) {
Graph* graph = malloc(sizeof(Graph));
graph->numVertices = vertices;
for (int i = 0; i < vertices; i++) {
graph->adjLists[i] = NULL;
}
return graph;
}
// 创建节点
Node* createNode(int v) {
Node* newNode = malloc(sizeof(Node));
newNode->vertex = v;
newNode->next = NULL;
return newNode;
}
// 添加边
void addEdge(Graph* graph, int src, int dest) {
Node* newNode = createNode(dest);
newNode->next = graph->adjLists[src];
graph->adjLists[src] = newNode;
newNode = createNode(src);
newNode->next = graph->adjLists[dest];
graph->adjLists[dest] = newNode;
}
// 查找第一个邻接顶点
int FirstAdjVex(Graph* graph, int vertex) {
Node* adjList = graph->adjLists[vertex];
if (adjList != NULL) {
return adjList->vertex; // 返回第一个邻接顶点
}
return -1; // 如果没有邻接顶点,返回-1
}
// 查找下一个邻接顶点
int NextAdjVex(Graph* graph, int vertex, int current) {
Node* adjList = graph->adjLists[vertex];
while (adjList != NULL) {
if (adjList->vertex == current) {
if (adjList->next != NULL) {
return adjList->next->vertex; // 返回下一个邻接顶点
} else {
return -1; // 如果没有下一个邻接顶点,返回-1
}
}
adjList = adjList->next;
}
return -1; // 如果没有找到当前顶点,返回-1
}
// 广度优先搜索
void BFS(Graph* graph, int vertex, int* visited) {
visited[vertex] = 1; // 标记为已访问
printf("Visited %d\n", vertex);
LinkQueue *queue = (LinkQueue*)malloc(sizeof(LinkQueue));
InitQueue(queue);
EnQueue(queue, vertex);
while (queue->rear != queue->front)
{
DeQueue(queue, vertex);
int adjVertex = FirstAdjVex(graph, vertex);
while (adjVertex != -1) {
if (!visited[adjVertex]) {
visited[adjVertex] = 1;
printf("Visited %d\n", adjVertex);
EnQueue(queue, adjVertex);
}
adjVertex = NextAdjVex(graph, vertex, adjVertex);
}
}
}
// 打印图
void printGraph(Graph* graph) {
for (int v = 0; v < graph->numVertices; v++) {
Node* temp = graph->adjLists[v];
printf("Vertex %d: ", v);
while (temp) {
printf("%d -> ", temp->vertex);
temp = temp->next;
}
printf("NULL\n");
}
}
int main() {
Graph* graph = createGraph(5);
addEdge(graph, 0, 1);
addEdge(graph, 0, 4);
addEdge(graph, 1, 2);
addEdge(graph, 1, 3);
addEdge(graph, 1, 4);
addEdge(graph, 2, 3);
addEdge(graph, 3, 4);
printGraph(graph);
int visited[MAX_VERTICES] = {0}; // 访问标记数组
printf("Depth First Search starting from vertex 0:\n");
DFS(graph, 0, visited);
return 0;
}
图的应用
最小生成树
MST性质: 假设N=(V,E)是一个连通网,U是顶点V的一个非空子集。若(u,v)是一条具有最小权值的边,其中 $u \in U, v \in V-U$ ,则必定存在一棵包含边(u, v)的最小生成树
普里姆算法
时间复杂度为O(n2),与网中的边数无关,因此适用于求稠密网的最小生成树
构造过程
假设N=(V, E)是连通网,TE是N上最小生成树中边的集合
- $U={ u_0 } (u_0 \in V), \quad TE = {}$
- 在所有$u \in U, \quad v \in V-U$的边$(u, v) \in E$ 中找一条权值最小的边 $(u_0, v_0)$ 并入集合TE,同时 $v_0$ 并入U
- 重复步骤2,直到U=V为止 此时TE中必有n-1条边,则T=(V, TE)为N的最小生成树
算法实现
#define MaxInt 32767 // 表示极大值∞
#define MVNum 100 // 最大顶点数
typedef char VerTexType; // 假设顶点的数据类型是字符型
typedef int ArcType; // 假设边的权值类型为整型
typedef struct
{
VerTexType vexs[MVNum]; // 顶点表
ArcType arcs[MVNum][MVNum]; // 邻接矩阵
int vexnum, arcnum; // 图的当前顶点数和边数
}AMGraph;
// 辅助数组,用来记录从顶点集U到V-U的权值最小的边
struct {
VerTexType adjvex; // 最小边在U中的顶点位置
ArcType lowcost; // 最小边的权值
}closedge[MVNum];
// 确定顶点v的在图中的位置
int LocateVex(AMGraph *g, VerTexType v)
{
for (int i = 0; i < g->vexnum; i++)
{
if (g->vexs[i] == v)
{
return i;
}
}
return -1;
}
int Min()
{
int min = 10000;
int k = 0;
for (int i = 0; i < MVNum; i++)
{
if (closedge[i].lowcost != 0 && closedge[i].lowcost < min) {
min = closedge[i].lowcost;
k = i;
}
}
return k;
}
// 无向网G以邻接矩阵形式存储,从顶点u出发构造G的最小生成树T,输入T的各条边
void MiniSpanTree(AMGraph *g, VerTexType u)
{
int k = LocateVex(g, u);
// 对V-U的每一个顶点vi, 初始化closedge[i]
for (int i = 0; i < g->vexnum; i++)
{
if (i != k)
{
closedge[i].adjvex = u;
closedge[i].lowcost = g->arcs[k][i];
}
}
// 初始U = {u}
closedge[k].lowcost = 0;
// 选择其余n-1个顶点,生成n-1条边(n=g->vexnum)
for (int i = 1; i < g->vexnum; i++)
{
// 求出T的下一个结点: 第k个顶点,closedge[k]中存有当前最小边
int k = Min();
// u0为最小边的一个顶点,u0∈U
VerTexType u0 = closedge[k].adjvex;
// v0位最小边的另一个顶点,v0∈V-U
VerTexType v0 = g->vexs[k];
printf("%c\t%c\n", v0, u0);
// 第k个顶点并入U集
closedge[k].lowcost = 0;
for (int j = 0; j < g->vexnum; j++)
{
// 新顶点并入U后重新选择最小边
if (g->arcs[k][j] < closedge[j].lowcost)
{
closedge[j].adjvex = g->vexs[k];
closedge[j].lowcost = g->arcs[k][j];
}
}
}
}
克鲁斯卡尔算法
时间复杂度为O(elog2e),与网中的边数有关,与普里姆算法相比,克鲁斯卡尔算法更适合于求稀疏网的最小生成树
构造过程
假设连通网N=(V, E),将N中的边按权值从小到大的顺序排列
- 初始状态为只有n个顶点而无边的非连通图T=(V, {}),图中每个顶点自成一个连通分量
- 在E中选择权值最小的边,若该边依附的顶点落在T中不同的连通分量上(即不形成回路),则将此边加入到T中,否则舍去此边而选择下一条权值最小的边
- 重复步骤2,直至T中所有顶点都在同一连通分量上为止
算法实现
结构体Edge:存储边的信息,包括边的两个顶点信息和权值
Vexset[i]:标识各个顶点所属的连通分量。对每个顶点vi∈V,在辅助数组中存在一个相应元素Vexset[i]表示该顶点所在的连通分量。初始时Vexset[i]=i,表示各顶点自成一个连通分量
- 将数组edges中的元素按权值从小到大排序
- 依次查看数组edges的边,循环执行以下操作
a. 依次从排好序的数组edges中选出一条边 $(U_1, U_2)$
b. 在Vexset中分别查找 $v_1$ 和 $v_2$ 所在的连通分量 $vs_1$ 和 $vs_2$ ,进行判断
- 如果 $vs_1$ 和 $vs_2$ 不等,表明所选的两个顶点分属不同的连通分量,输出此边,并合并 $vs_1$ 和 $vs_2$ 两个连通分量
- 如果 $vs_1$ 和 $vs_2$ 相等,表明所选的两个顶点属于同一个连通分量,舍去此边而选择下一条权值最小的边
#include <stdlib.h>
#define MaxInt 32767 // 表示极大值∞
#define MVNum 100 // 最大顶点数
typedef char VerTexType; // 假设顶点的数据类型是字符型
typedef int ArcType; // 假设边的权值类型为整型
typedef struct
{
VerTexType vexs[MVNum]; // 顶点表
ArcType arcs[MVNum][MVNum]; // 邻接矩阵
int vexnum, arcnum; // 图的当前顶点数和边数
}AMGraph;
// 结构体数组Edge:存储边的信息,包括边的两个顶点信息和权值。
typedef struct
{
VerTexType head; // 边的始点
VerTexType tail; // 边的终点
ArcType lowcost; // 边的权值
}Edge;
// 辅助数组
int Vexset[MVNum];
// 确定顶点v的在图中的位置
int LocateVex(AMGraph *g, VerTexType v)
{
for (int i = 0; i < g->vexnum; i++)
{
if (g->vexs[i] == v)
{
return i;
}
}
return -1;
}
// 比较函数,用于边的排序
int compare(const void *a, const void *b) {
Edge *edgeA = (Edge *)a;
Edge *edgeB = (Edge *)b;
return edgeA->lowcost - edgeB->lowcost;
}
// 无向网G以邻接矩阵形式存储,从顶点u出发构造G的最小生成树T,输入T的各条边
void MiniSpanTree(AMGraph *g, VerTexType u)
{
// 从邻接矩阵中提取边
Edge edges[g->vexnum];
int edgeCount = 0;
for (int i = 0; i < g->vexnum; i++) {
for (int j = i + 1; j < g->vexnum; j++) {
if (g->arcs[i][j] != MaxInt) {
edges[edgeCount].head = i;
edges[edgeCount].tail = j;
edges[edgeCount].lowcost = g->arcs[i][j];
edgeCount++;
}
}
}
qsort(edges, edgeCount, sizeof(edges[0]), compare);
// 表示各顶点自成一个连通分量
for (int i = 0; i < g->vexnum; i++)
{
Vexset[i] = i;
}
for (int i = 0; i < g->arcnum; i++)
{
int v1 = LocateVex(g, edges[i].head);
int v2 = LocateVex(g, edges[i].tail);
int vs1 = Vexset[v1]; // 获取边Edge[i]的始点所在的连通分量
int vs2 = Vexset[v2]; // 获取边Edge[i]的终点所在的连通分量
// 边的两个顶点分属不同的连通分量
if (vs1 != vs2)
{
printf("%d\t%d\n", edges[i].head, edges[i].tail);
// 合并vs1和vs2两个分量,即两个集合统一编号
for (int j = 0; j < g->vexnum; j++)
{
if (Vexset[j] == vs2)
{
Vexset[j] == vs1;
}
}
}
}
}
最短路径
从某个源点到其余各顶点的最短路径
给定带权有向图G和源点 $v_0$ ,求从 $v_0$ 到G中其余各顶点的最短路径 Dijkstra算法:按路径长度递减的次序产生最短路径
求解过程
对于网N=(V,E),将N中顶点分成两组: 第一组S:已求出的最短路径的终点集合(初始时只包含源点 $v_0$ ) 第二组V-S:尚未求出的最短路径的集合(初始时为V-{ $v_0$ })
算法将按各顶点与 $v_0$ 间最短路径长度递增的次序,逐个将集合V-S中的顶点加入到集合S中去。在这个过程中,总保持 $v_0$ 到集合S中各顶点的路径长度始终不大于到集合V-S中各顶点的路径长度
算法实现
假设用带权的邻接矩阵arcs来表示带权有向网G,G.arcs[i][j]表示弧 $
算法的实现引入以下辅助数组的数据结构:
- 一维数组S[i]:记录从源点 $v_0$ 到终点 $v_i$ 是否已被确定为最短路径长度,true表示确定, false表示尚未确定
- 一维数组Path[i]:记录从源点 $v_0$ 到终点 $v_i$ 的当前最短路径上 $v_i$ 的直接前驱顶点序号。其初值为:如果从 $v_0$ 到$v_i$ 有弧,则Path[i]为 $v_0$ ,否则为-1
- 一维数组D[i]:记录从源点 $v_0$ 到终点 $v_i$ 的当前最短路径长度。其初值为:其初值为:如果从 $v_0$ 到 $v_i$ 有弧,则D[i]为弧上的权值,否则为 $\infty$
步骤如下
- 初始化:
- 将源点 $v_0$ 加到S中,即S[ $v_0$ ]=true;
- 将 $v_0$ 到各个终点的最短路径长度初始为权值,即D[i]=G.arcs[ $v_0$ ][ $v_i$ ], ( $v_i \in V-S$ )
- 如果 $v_0$ 和顶点 $v_i$ 之间有弧,则将 $v_i$ 的前驱值为 $v_0$ ,即Path[i]= $v_0$ ,否则Path[i]=-1
- 循环n-1次,执行以下操作: a. 选择下一条最短路径的终点 $v_k$ ,使得: $D[k] = Min{D[i] \quad | \quad v_i \in V-S}$ b. 将$v_k$加到S中,即S[ $v_k$ ]=true c. 根据条件更新从 $v_0$ 出发到集合V-S上任一顶点的最短路径的长度。若条件D[k]+G.arcs[k][i] < D[i]成立,则更新D[i]=D[k]+G.arcs[k][i],同时更改 $v_i$ 的前驱为 $v_k$ ,Paht[i]=k
#define MaxInt 32767 // 表示极大值∞
#define MVNum 100 // 最大顶点数
typedef char VerTexType; // 假设顶点的数据类型是字符型
typedef int ArcType; // 假设边的权值类型为整型
typedef struct
{
VerTexType vexs[MVNum]; // 顶点表
ArcType arcs[MVNum][MVNum]; // 邻接矩阵
int vexnum, arcnum; // 图的当前顶点数和边数
}AMGraph;
// Dijkstra算法求有向网G的v0顶点到其余顶点的最短距离
void ShortestPath(AMGraph *g, int v0)
{
int s[g->vexnum]; // 0表示false, 1表示true
int path[g->vexnum];
int d[g->vexnum];
int n = g->vexnum;
for (int v = 0; v < n; v++)
{
s[v] = 0; // s初始为空集
d[v] = g->arcs[v0][v]; // 将v0到各个顶点的最短路径长度初始为弧上的权值
// 如果v0和v之间有弧,则将v的前驱置为v0
if (d[v] < MaxInt) {
path[v] = v0;
} else
{
// 如果v0和v之间无弧,则将v的前驱置为-1
path[v] = -1;
}
}
s[v0] = 1; // 将v0加入s
d[v0] = 0; // 源点到源点的距离为零
for (int i = 1; i < n; i++)
{
int v = 0;
int min = MaxInt;
for (int w = 0; w < n; w++)
{
if (s[w] == 0 && d[w] < min)
{
v = w;
min = d[w];
}
}
s[v] = 1; // 将v加入s
for (int w = 0; w < n; w++)
{
if (s[w] == 0 && d[v] + g->arcs[v][w] < d[w])
{
d[w] = d[v] + g->arcs[v][w];
path[w] = v; // 更新w的前驱为v
}
}
}
}
每一对顶点之间的最短路径
Floyd算法:使用带权的邻接矩阵arcs来表示有向网G,求从顶点 $v_i$ 到 $v_j$ 的最短路径
算法实现
辅助数据结构
- 二维数组Path[i][j]:最短路径上顶点 $v_j$ 的前一顶点的序号
- 二维数组D[i][j]:记录顶点 $v_i$ 和顶点 $v_j$ 之间的最短路径长度
步骤如下
将 $v_i$ 到 $v_j$ 的最短路径长度初始化,即D[i][j]=G.arcs[i][j],然后进行n次比较和更新
- 在 $v_i$ 和 $v_j$ 间加入顶点 $v_0$ ,比较 $(v_i, v_j)$ 和 $(v_i, v_0, v_j)$ 的路径长度,取其中较短者作为 $v_i$到 $v_j$ 的中间顶点序号不大于0的最短路径
- 在 $v_i$ 和 $v_j$ 间加入 $v_1$ , 得到 $(v_j, \cdots, v_1)$ 和 $(v_1, \cdots, v_j)$ ,其中 $(v_j, \cdots, v_1)$ 是 $v_j$ 到 $v_1$ 的且中间顶点的序号不大于0的最短路径, $(v_1, \cdots, v_j)$ 是 $v_1$ 到 $v_j$ 的且中间顶点序号不大于0的最短路径,这两条路径已在上一步中求出。比较 $(v_i, \cdots, v_1, \cdots, v_j)$ 与上一步求出的 $v_i$ 到 $v_j$ 的中间顶点序号不大于0的最短路径,取其中较短者作为 $v_i$ 到 $v_j$ 的中间顶点序号不大于1的最短路径
- 依此类推,在 $v_i$ 和 $v_j$ 间加入顶点 $v_k$ ,若 $(v_i, \cdots, v_k)$ 和 $(v_k, \cdots, v_j)$ 分别是 $v_i$ 到 $v_k$ 和 $v_k$ 到 $v_j$ 的中间顶点序号不大于k-1的最短路径,则将 $(v_i, \cdots, v_k, \cdots, v_j)$ 和已经得到的从 $v_i$ 到 $v_j$ 且中间顶点序号不大于k-1的最短路径相比较,其长度较短者便是从 $v_i$ 到 $v_j$ 的中间顶点序号不大于k的最短路径。这样,经过n次比较后,最后求得的必是从 $v_i$ 到 $v_j$ 的最短路径
#define MaxInt 32767 // 表示极大值∞
#define MVNum 100 // 最大顶点数
typedef char VerTexType; // 假设顶点的数据类型是字符型
typedef int ArcType; // 假设边的权值类型为整型
typedef struct
{
VerTexType vexs[MVNum]; // 顶点表
ArcType arcs[MVNum][MVNum]; // 邻接矩阵
int vexnum, arcnum; // 图的当前顶点数和边数
}AMGraph;
// Floyd算法求有向网G中各对顶点i和j之间的最短路径
void ShortestPath(AMGraph *g)
{
int path[MVNum][MVNum];
int d[MVNum][MVNum];
for (int i = 0; i < g->vexnum; i++)
{
for (int j = 0; j < g->vexnum; j++)
{
d[i][j] = g->arcs[i][j];
if (d[i][j] < MaxInt)
{
// 如果i和j之间有弧,则将j的前驱置为i
path[i][j] = i;
} else
{
// 如果i和j之间无弧,则将j的前驱置为-1
path[i][j] = -1;
}
}
for (int k = 0; k < g->vexnum; g++)
{
for (int i = 0; i < g->vexnum; i++)
{
for (int j = 0; j < g->vexnum; j++)
{
// 从i经k到j的一条路径更短
if (d[i][k] + d[k][j] < d[i][j])
{
d[i][j] = d[i][k] + d[k][j];
path[i][j] = path[k][j]; // 更改j的前驱为k
}
}
}
}
}
}
拓扑排序
拓扑排序过程
- 在有向图中选一个无前驱的顶点且输出它
- 从图中删除该顶点和所有以它为尾的弧
- 重复1和2,直至不存在无前驱的顶点
- 若此时输出的顶点数小于有向图中的顶点数,则说明有向图中有环,否则输出的顶点序列即为一个拓扑序列
拓扑排序实现
辅助数据结构
- 一维数组indegree[i]:存放各顶点入度,没有前驱的顶点就是入度为零的顶点。删除顶点及以它为尾的弧的操作,可不必真正为图的存储结构进行改变,可用弧头顶点的入度减1的办法来实现
- 栈s:暂存所有入度为零的顶点,这样可以避免重复扫描数组indegree检测入度为零的顶点,提高算法效率
- 一维数组topo[i]:记录拓扑序列的顶点序号
算法步骤
- 求出各顶点的入度存入数组indegree[i]中,并将入度为零的顶点入栈
- 只要栈不空,则重复以下操作: a. 将栈顶顶点 $v_i$ 出栈并保存在拓扑数组topo中 b. 对顶点 $v_i$ 的每个邻接点 $v_k$ 的入度减1,如果 $v_k$ 的入度变为0,则将 $v_k$ 入栈
- 如果输出顶点个数少于AOV-网的顶点个数,则网中存在环,无法进行拓扑排序,否则拓扑排序成功
#include<stdio.h>
#include<stdlib.h>
#define MVNum 100 // 最大顶点数
typedef char VerTexType; // 假设顶点的数据类型是字符型
typedef int ArcType; // 假设边的权值类型为整型
typedef struct ArcNode {
int adjvex; // 该边所指向的顶点的位置
struct ArcNode *nextarc; // 指向下一条边的指针
}ArcNode;
typedef struct VNode {
VerTexType data;
ArcNode *firstarc; // 指向第一条依附该顶点的边的指针
}VNode, AdjList[MVNum];
typedef struct ALGraph {
AdjList vertices;
int vexnum, arcnum; // 图的当前顶点数和边数
}ALGraph;
typedef struct StackNode
{
int data;
struct StackNode* next;
}StackNode,*LinkStack;
// InitStack 初始化链栈
int InitStack(LinkStack s) {
s = NULL;
return 0;
}
// Push 入栈
// 1. 为入栈元素分配空间,用指针p指向
// 2. 将新节点数据域置为e
// 3. 将新节点插入栈顶
// 4. 修改栈顶指针为p
LinkStack Push(LinkStack s, int e) {
LinkStack p = (LinkStack)malloc(sizeof(StackNode));
p->data = e;
p->next = s;
s = p;
return s;
}
// Pop 出栈
// 1. 判断栈是否为空,若空则返回-1
// 2. 将栈顶元素赋给e
// 3. 临时保存栈顶元素的地址,以备释放
// 4. 修改栈顶指针,指向新的栈顶元素
// 5. 释放原栈顶元素的地址
LinkStack Pop(LinkStack s, int *e) {
if (s == NULL) {
return s;
}
*e = s->data;
LinkStack p = s;
s = s->next;
free(p);
return s;
}
// 求顶点入度
void FindInDegree(ALGraph *g, int indegree[])
{
for (int i = 0; i < g->vexnum; i++)
{
indegree[i] = 0;
}
for (int i = 0; i < g->vexnum; i++)
{
ArcNode *p = g->vertices[i].firstarc;
while (p)
{
indegree[p->adjvex]++;
p = p->nextarc;
}
}
}
// 有向图G采用邻接表存储结构
// 若G无回路,则生成G的一个拓扑序列topo[]并返回1,否则返回0
int TopologicalSort(ALGraph *g, int topo[])
{
int indegree[MVNum];
FindInDegree(g, indegree);
LinkStack s;
InitStack(s);
for (int i = 0; i < g->vexnum; i++)
{
if (indegree[i] == 0)
{
Push(s, i);
}
}
int m = 0;
while (s != NULL)
{
int i;
// 栈顶顶点vi出栈
Pop(s, &i);
// 将vi保存在拓扑序列数组topo中,并对输出顶点计数
topo[m++] = i;
// p指向vi的第一个邻接点
ArcNode *p = g->vertices[i].firstarc;
while (p != NULL)
{
// vk为vi的邻接点
int k = p->adjvex;
// vi的每个邻接点的入度减1
--indegree[k];
// 若vk顶点入度为0,则入栈
if (indegree[k] == 0)
{
Push(s, k);
}
// p指向顶点vi的下一个邻接点
p = p->nextarc;
}
}
if (m < g->vexnum)
{
return 0;
}
return 1;
}
关键路径
求解过程
- 对图中顶点进行排序,在排序过程中按拓扑序列求出每个事件的最早发生时间ve(i)
- 按逆拓扑序列求出每个事件的最迟发生时间vl(i)
- 求出每个活动 $a_i$ 的最早开始时间e(i)
- 求出每个活动 $a_i$ 的最晚开始时间l(i)
- 找出e(i)=l(i)的活动 $a_i$ ,即位关键活动。由关键活动形成的由源点到汇点的每一条路径就是关键路径,关键路径有可能不止一条
算法实现
由于每个事件的最早发生时间ve(i)和最迟发生时间vl(i)要在拓扑序列的基础上进行计算,所以关键路径算法的实现要基于拓扑排序算法,采用邻接表做有向图的存储结构
辅助数据结构
- 一维数组ve[i]:事件 $v_i$ 的最早发生时间
- 一维数组vl[i]:事件 $v_i$ 的最迟发生时间
- 一维数组topo[i]:记录拓扑序列的顶点序号
算法步骤
- 调用拓扑排序算法,使拓扑序列保存在数组topo中
- 将每个事件的最早发生时间ve[i]初始化为零
- 根据topo中的值,按从前向后的拓扑次序,依次求每个事件的最早发生时间,循环几次,执行以下操作: a. 取得拓扑序列中的顶点序号k,k=topo[i] b. 用指针p依次指向k的每个邻接顶点,取得每个邻接顶点的序号j=p->adjvex,依次更新顶点j的最早发生时间ve[j] $if (ve[j] < ve[k]+p->weight) ve[j] = ve[k] + p->weight;$
- 将每个事件的最迟发生时间vl[i]初始化为汇点的最早发生时间, vl[i]=ve[n-1]
- 根据topo中的值,按从后向前的逆拓扑次序,依次求每个时间的最迟发生时间,循环n次,执行以下操作: a. 取得拓扑序列中的顶点序号k,k=topo[i] b. 用指针p依次指向k的每个邻接顶点,取得每个邻接顶点的序号j=p->adjvex,依次根据k的邻接点,更新k的最迟发生时间vl[k] $if (vl[k] > vl[j] - p->weight) vl[k] = vl[j] - p->weight$
- 判断某一活动是否为关键活动,循环n次,执行以下操作:对于每个顶点i,用指针p依次指向i的每个邻接点,取得每个邻接顶点的序号j=p->adjvex,分别计算活动< $v_i$ , $v_j$ >的最早和最迟发生时间e和l,
e=ve[i];l=vl[j]-p->weight;。如果e和l相等,则活动< $v_i$ , $v_j$ >为关键活动,输出弧 $v_j$
#include<stdio.h>
#include<stdlib.h>
#define MVNum 100 // 最大顶点数
typedef char VerTexType; // 假设顶点的数据类型是字符型
typedef struct ArcNode {
int adjvex; // 该边所指向的顶点的位置
int weight; // 权值
struct ArcNode *nextarc; // 指向下一条边的指针
}ArcNode;
typedef struct VNode {
VerTexType data;
ArcNode *firstarc; // 指向第一条依附该顶点的边的指针
}VNode, AdjList[MVNum];
typedef struct ALGraph {
AdjList vertices;
int vexnum, arcnum; // 图的当前顶点数和边数
}ALGraph;
typedef struct StackNode
{
int data;
struct StackNode* next;
}StackNode,*LinkStack;
// InitStack 初始化链栈
int InitStack(LinkStack s) {
s = NULL;
return 0;
}
// Push 入栈
// 1. 为入栈元素分配空间,用指针p指向
// 2. 将新节点数据域置为e
// 3. 将新节点插入栈顶
// 4. 修改栈顶指针为p
LinkStack Push(LinkStack s, int e) {
LinkStack p = (LinkStack)malloc(sizeof(StackNode));
p->data = e;
p->next = s;
s = p;
return s;
}
// Pop 出栈
// 1. 判断栈是否为空,若空则返回-1
// 2. 将栈顶元素赋给e
// 3. 临时保存栈顶元素的地址,以备释放
// 4. 修改栈顶指针,指向新的栈顶元素
// 5. 释放原栈顶元素的地址
LinkStack Pop(LinkStack s, int *e) {
if (s == NULL) {
return s;
}
*e = s->data;
LinkStack p = s;
s = s->next;
free(p);
return s;
}
// 求顶点入度
void FindInDegree(ALGraph *g, int indegree[])
{
for (int i = 0; i < g->vexnum; i++)
{
indegree[i] = 0;
}
for (int i = 0; i < g->vexnum; i++)
{
ArcNode *p = g->vertices[i].firstarc;
while (p)
{
indegree[p->adjvex]++;
p = p->nextarc;
}
}
}
// 有向图G采用邻接表存储结构
// 若G无回路,则生成G的一个拓扑序列topo[]并返回1,否则返回0
int TopologicalSort(ALGraph *g, int topo[])
{
int indegree[MVNum];
FindInDegree(g, indegree);
LinkStack s;
InitStack(s);
for (int i = 0; i < g->vexnum; i++)
{
if (indegree[i] == 0)
{
Push(s, i);
}
}
int m = 0;
while (s != NULL)
{
int i;
// 栈顶顶点vi出栈
Pop(s, &i);
// 将vi保存在拓扑序列数组topo中,并对输出顶点计数
topo[m++] = i;
// p指向vi的第一个邻接点
ArcNode *p = g->vertices[i].firstarc;
while (p != NULL)
{
// vk为vi的邻接点
int k = p->adjvex;
// vi的每个邻接点的入度减1
--indegree[k];
// 若vk顶点入度为0,则入栈
if (indegree[k] == 0)
{
Push(s, k);
}
// p指向顶点vi的下一个邻接点
p = p->nextarc;
}
}
if (m < g->vexnum)
{
return 0;
}
return 1;
}
// g为邻接表存储的有向图,输出g的各项关键活动
int CriticalPath(ALGraph *g)
{
int topo[g->vexnum];
int ve[g->vexnum];
int vl[g->vexnum];
if (TopologicalSort(g, topo) == 0)
{
return 0;
}
// 每个事件的最早发生时间初始化为零
for (int i = 0; i < g->vexnum; i++)
{
ve[i] = 0;
}
// 按拓扑次序求每个事件的最早发生时间
for (int i = 0; i < g->vexnum; i++)
{
int k = topo[i];
// 取得拓扑序列中的顶点序号k
ArcNode *p = g->vertices[k].firstarc;
// 依次更新k的所有邻接点的最早发生时间
while (p != NULL)
{
int j = p->adjvex;
if (ve[j] < ve[k] + p->weight) {
ve[j] = ve[k] + p->weight;
}
p = p->nextarc;
}
}
// 每个事件的最迟发生时间初始为ve[n-1]
for (int i = 0; i < g->vexnum; i++)
{
vl[i] = ve[g->vexnum-1];
}
// 按逆拓扑排序求每个事件的最迟发生时间
for (int i = g->vexnum-1; i >= 0; i--)
{
int k = topo[i];
ArcNode *p = g->vertices[k].firstarc;
while (p != NULL)
{
int j = p->adjvex;
if (vl[k] > vl[j] - p->weight)
{
vl[k] = vl[j] - p->weight;
}
p = p->nextarc;
}
}
// 判断每一活动是否为关键活动
for (int i = 0; i < g->vexnum; i++)
{
ArcNode *p = g->vertices[i].firstarc;
while (p != NULL)
{
int j = p->adjvex;
int e = ve[i];
int l = vl[j] - p->weight;
if (e == l)
{
printf("关键活动: %c -> %c\n", g->vertices[i].data, g->vertices[j].data);
}
p = p->nextarc;
}
}
}